
Продам Бенд декодер защита входа переключение фильтров
Информация об авторе
Дата регистрации: 06.07.2022 09:53:05Последний визит на сайт: 05.05.2026 20:54:07
Автор: R7ND (частное лицо)
Пользователь провел на сайте 3 года, 10 месяцев и 4 дня Город: Ростов-на-Дону
Адрес в интернете: https://web.archive.org/web/20170816013635/http://www.ut2fw.com/taxonomy/term/8
Полное описание всего функционала длинное, поэтому здесь в объявлении даю частично.
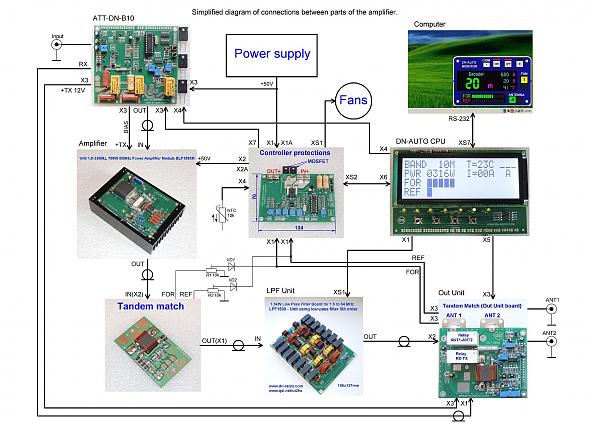
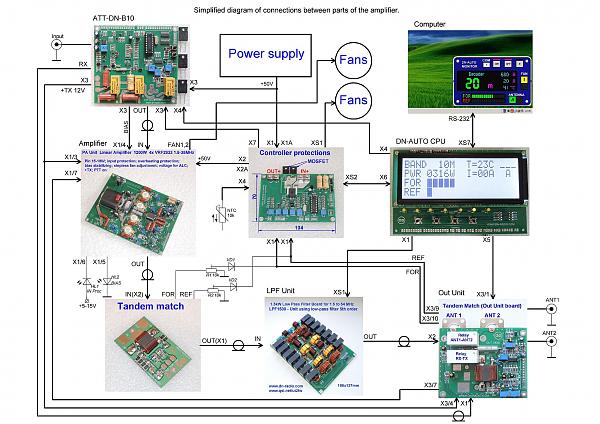
Данное устройство ATT-DN-B10 является дальнейшим развитием платы DN-B10.
Устройство ATT-DN-B10 включает в себя такие функции:
1. Автоматический диапазонный декодер (10 диапазонов)
2. Секвенсор (управляет реле RX-TX, смещением, напряжением +12 В TX)
3. Управляет реле входных аттенюаторов
4. Управляет входным усилителем защиты
5. Управляет ALC для трансивера
6. Управляет изменением мощности внешнего усилителя
7. Работает в комплекте с DN-AUTO
8. Подключение с компьютера для изменения настроек ATT-DN-B10
Его можно использовать для автоматического выбора любых устройств в соответствии с частотой сигнала, подаваемого на Band decoder. Например, для переключения антенн, фильтров, усилителей.
Принцип работы декодера основан на измерении частоты сигнала от передатчика. (Автоматическое изменение диапазона на основе частоты TX. )
Достаточно высокочастотного напряжения от ~5 В для стабильной работы, что соответствует мощности 0, 5 Вт при импедансе 50 Ом.
Управление полосовым декодером выполняет микропроцессор PIC16F648A. Измеритель частоты микропроцессора определяет частоту входного сигнала и устанавливает соответствующий диапазон. Минимальный шаг настройки частоты составляет 10 кГц. Граничные диапазоны распределены следующим образом:
1, 0 – 2, 5 МГц – 160 м;
2, 51 – 4, 0 МГц – 80 м;
4, 01 – 8, 0 МГц – 40 м;
8, 01 – 11, 0 МГц – 30 м;
11, 01 – 16, 0 МГц – 20 м;
16. 01 – 20. 0МГц – 17м;
20. 01 – 23. 0МГц – 15м;
23, 01 – 26, 0 МГц – 12 м;
26, 01 – 31, 0 МГц – 10 м;
31, 01 – 55 МГц – 6 м;
Секвенсор управляет переключением режимов работы усилителя RX-TX. Для безопасного переключения соблюдается определенная последовательность управляющих сигналов. Алгоритм был записан в программе микропроцессора.
Порядок перехода усилителя из RX-режима в TX-режим следующий:
1. Полосовой декодер включает соответствующий фильтр диапазона в усилителе.
2. Измеряется входная мощность. Если входная мощность превышает мощность, записанную в памяти микропроцессора – это запрещает выполнение следующего шага и останавливает работу. В этом случае мигает индикатор ЖКИ - платы DN-AUTO CPU.
Если мощность не превышает мощность, записанную в памяти микропроцессора – это позволяет перейти к следующему шагу – включению секвенсора.
Секвенсор включается по сигналу PTT от приемопередатчика.
3. ALC снижает мощность приемопередатчика до 0 Вт на 50 Мс.
4. В течение 50 мс, пока включен ALC, антенна подключается к выходу усилителя. Задержка антенного реле составляет 40 Мс.
5. Вход усилителя подключается к приемопередатчику. Задержка реле составляет 10 Мс.
6. Подается напряжение BIAS (смещение).
7. ALC увеличивает мощность трансивера до номинальной.
8. Когда трансивер возвращается в RX-режим, секвенсор выключается, а усилитель переключается в RX-режим.
и т. д. и т. п. далее.. .
Кого тема заинтересует - сделайте запрос - скину ссылку на яндекс-диск с подробной информацией.

